There’s a wide class of coordinate transforms that are typically given backwards. Witness spherical polar coordinates:
Typically we already know what our cartesian coordinates 


but it looks like we’ve only been given the inverse map

Now, really we know how to invert these expressions. But doing calculus with inverse functions like 
What we’re interested in is what becomes of the basis vectors 

Let’s imagine that the manifold 


Recall that a map 



But this is exactly the same as saying that the pullback induced by the inverse map 

Another way of phrasing this is that the exterior derivative commutes with pullbacks. Let 


A correct method for covectors
But now let 


using the fact that we know 

Rinse and repeat for the other basis covectors:

So given a covector 


An incorrect method for vectors
But what about ordinary vectors?
Let’s try and naively apply the calculus we already know, so try the following (for the 

Now when we contract this with our earlier expression for 
But instead we get

What went wrong? We neglected to consider contributions to 
A correct method for vectors
Write out completely general expressions for

All we know about these basis vectors is that, when contracted with the basis covectors, we should obtain the identity matrix, even when they’ve been written out in spherical coordinates:

(
So we repeatedly apply this property to the expression above, essentially inverting the 3-by-3 matrix that has components 
For example, for

which gives the correct result when contracted with
Conclusion
The essential difference between vectors and covectors is that, under maps, one of them moves one way and the other one moves the other way. Hopefully the little parable in this blogpost has illustrated this fact.
When you have a metric you can talk about them having indices in different places, but that allows you to forget about the difference between them altogether! The interesting differences between vectors and covectors come into play when:
- You don’t necessarily know what the metric is.
- You’re using maps between manifolds/coordinate systems whose inverses don’t necessarily exist (for example, the projection onto a submanifold has no inverse).
The fact that the exterior derivative commutes with pullbacks also explains why it’s covectors that show up in integrals, thanks to the ‘change of variables’ formula

It also explains why it’s so easy to find the form of the metric in new coordinates, because the metric is a rank (0,2)-tensor, i.e. a sum of pairs of covectors, tensor-producted together:

and we can just substitute for 
 ) which is supposedly key to the whole process. Here I will attempt to describe what this 1-form is, why it is useful, and the role it plays in the fundamentals of classical mechanics.
) which is supposedly key to the whole process. Here I will attempt to describe what this 1-form is, why it is useful, and the role it plays in the fundamentals of classical mechanics.  be a smooth function, let
be a smooth function, let  be a vector field on
be a vector field on  be a covector field on
be a covector field on 


 ) and a vector field (a function
) and a vector field (a function  ), and similarly for covectors. Typically, the various kinds of product are evaluated pointwise, e.g. if
), and similarly for covectors. Typically, the various kinds of product are evaluated pointwise, e.g. if  are functions then
are functions then  .
.  be a smooth manifold, and specialise the above discussion to the case
be a smooth manifold, and specialise the above discussion to the case  ,
,  . Let
. Let  be coordinates on
be coordinates on  be coordinates on
be coordinates on  ; that is, points on
; that is, points on  . Having these two equivalent ways to look at points on a cotangent bundle is an important point which we shall return to later.
. Having these two equivalent ways to look at points on a cotangent bundle is an important point which we shall return to later. 
 interpreted as a 1-form, and also has the coordinate expression
interpreted as a 1-form, and also has the coordinate expression  . How on earth can both these things be true, and besides, how can one ‘interpret a pullback as a 1-form’?!
. How on earth can both these things be true, and besides, how can one ‘interpret a pullback as a 1-form’?!  induces a pullback
induces a pullback  , but this map has exactly the domain and range of a covector field on
, but this map has exactly the domain and range of a covector field on  as a coordinate on
as a coordinate on  for coordinates on
for coordinates on  , equivalently writing
, equivalently writing  where in a slight abuse of notation we’ve written
where in a slight abuse of notation we’ve written  for the first
for the first  coordinates (the
coordinates (the  components) and
components) and  for the second
for the second  components).
components).  and its induced pullbacks and pushforwards. Let
and its induced pullbacks and pushforwards. Let  be a function on
be a function on  be a vector field on
be a vector field on  .
.  , the pushforward of
, the pushforward of  under
under 
 are
are  , i.e. just the
, i.e. just the  (in coordinates
(in coordinates  ):
): 
 is basically to place
is basically to place 

 . Treating
. Treating  as a map (a similar trick to above) means it induces a pushforward
as a map (a similar trick to above) means it induces a pushforward  and a pullback
and a pullback  .
.  be a function, and
be a function, and  a vector field with coordinate expression
a vector field with coordinate expression  , which is pushed-forward like so:
, which is pushed-forward like so: 
 acts on covector fields
acts on covector fields  :
: 
 , the interesting 1-form we were looking at above? We get
, the interesting 1-form we were looking at above? We get 
 that satisfies various properties; notably that
that satisfies various properties; notably that  , so that at least locally we can find an
, so that at least locally we can find an  . Abstractly, we want to find paths
. Abstractly, we want to find paths  such that the action integral
such that the action integral  is minimised:
is minimised: 
 (the minus sign being a mere convention) where
(the minus sign being a mere convention) where  that takes curves
that takes curves  and gives a real number, and they would then find the curve
and gives a real number, and they would then find the curve  that minimises that number (
that minimises that number (![\gamma : [0,1] \longrightarrow \mathcal{Q}](https://s0.wp.com/latex.php?latex=%5Cgamma+%3A+%5B0%2C1%5D+%5Clongrightarrow+%5Cmathcal%7BQ%7D&bg=ffffff&fg=333333&s=0&c=20201002) .
.  be a class of curves in
be a class of curves in  and ending point
and ending point  . Now define
. Now define ![W(q) \equiv S[\gamma_q] + W_0](https://s0.wp.com/latex.php?latex=W%28q%29+%5Cequiv+S%5B%5Cgamma_q%5D+%2B+W_0&bg=ffffff&fg=333333&s=0&c=20201002) for some constant
for some constant  , where
, where  that minimises
that minimises ![S[\gamma_q]](https://s0.wp.com/latex.php?latex=S%5B%5Cgamma_q%5D&bg=ffffff&fg=333333&s=0&c=20201002) . This function
. This function  is called Hamilton’s principal function, and note that it depends only on positions, and not the momenta! We now calculate
is called Hamilton’s principal function, and note that it depends only on positions, and not the momenta! We now calculate ![S[\gamma_q] = W(q) - W(q_0) \\ \:\:\:\: = \int_{\partial \gamma_q} W \\ \ \:\:\:\: = \int_{\gamma_q} dW \:\:\:\:\:\:\:\: (1) \\ \ \:\:\:\: = \int_{\gamma_q} (dW)^* \theta \:\:\:\:\:\:\:\: (2) \\ \ \:\:\:\: = \int_{dW(\gamma_q)} \theta \:\:\:\:\:\:\:\: (3) \\ \ \:\:\:\: = \int_\Gamma \theta.](https://s0.wp.com/latex.php?latex=S%5B%5Cgamma_q%5D+%3D+W%28q%29+-+W%28q_0%29+%5C%5C+%5C%3A%5C%3A%5C%3A%5C%3A+%3D+%5Cint_%7B%5Cpartial+%5Cgamma_q%7D+W+%5C%5C+%5C+%5C%3A%5C%3A%5C%3A%5C%3A+%3D+%5Cint_%7B%5Cgamma_q%7D+dW+%5C%3A%5C%3A%5C%3A%5C%3A%5C%3A%5C%3A%5C%3A%5C%3A+%281%29+%5C%5C+%5C+%5C%3A%5C%3A%5C%3A%5C%3A+%3D+%5Cint_%7B%5Cgamma_q%7D+%28dW%29%5E%2A+%5Ctheta+%5C%3A%5C%3A%5C%3A%5C%3A%5C%3A%5C%3A%5C%3A%5C%3A+%282%29+%5C%5C+%5C+%5C%3A%5C%3A%5C%3A%5C%3A+%3D+%5Cint_%7BdW%28%5Cgamma_q%29%7D+%5Ctheta+%5C%3A%5C%3A%5C%3A%5C%3A%5C%3A%5C%3A%5C%3A%5C%3A+%283%29+%5C%5C+%5C+%5C%3A%5C%3A%5C%3A%5C%3A+%3D+%5Cint_%5CGamma+%5Ctheta.+&bg=ffffff&fg=333333&s=2&c=20201002)


 as a pullback, similarly to the trick we pulled above with
as a pullback, similarly to the trick we pulled above with 
 , and call it time
, and call it time  , and similarly one of the momenta, say
, and similarly one of the momenta, say  , and call it energy
, and call it energy  (again, minus sign by convention), so that
(again, minus sign by convention), so that 
 in favour of the other coordinates (we will still write
in favour of the other coordinates (we will still write  and
and  for the other (n-1) coordinates).
for the other (n-1) coordinates).  by the definition of the exterior derivative, so we can immediately write down the first of Hamilton’s equations:
by the definition of the exterior derivative, so we can immediately write down the first of Hamilton’s equations: 
 property, we can define a quantity that gives us the second of Hamilton’s equations:
property, we can define a quantity that gives us the second of Hamilton’s equations: 


![S[\gamma] = \int_\gamma \left.g(X,X)\right|_{\gamma(s)}ds](https://s0.wp.com/latex.php?latex=S%5B%5Cgamma%5D+%3D+%5Cint_%5Cgamma+%5Cleft.g%28X%2CX%29%5Cright%7C_%7B%5Cgamma%28s%29%7Dds+&bg=ffffff&fg=333333&s=2&c=20201002)
 is arc length,
is arc length,  the metric, and
the metric, and  . The associated time-agnostic (‘non-autonomous’) method is fairly difficult, and this article discusses all the details.
. The associated time-agnostic (‘non-autonomous’) method is fairly difficult, and this article discusses all the details. of a manifold
of a manifold  ; relevant observables can be functions of both position and momentum. For example, the distribution function
; relevant observables can be functions of both position and momentum. For example, the distribution function  , which is the number density of particles in phase space (
, which is the number density of particles in phase space ( and
and  are coordinates on
are coordinates on  respectively).
respectively).  , where
, where  is the determinant of the metric evaluated at
is the determinant of the metric evaluated at  ; and the volume form for the full phase space is
; and the volume form for the full phase space is  . If we want to integrate out the momentum-dependence of some observable, we need just the momentum-part of the volume form. From the two expressions above we can see that this is
. If we want to integrate out the momentum-dependence of some observable, we need just the momentum-part of the volume form. From the two expressions above we can see that this is  .
.  , given by
, given by  , where
, where  .
.  , and note that the equation for
, and note that the equation for  , which allows us to solve for
, which allows us to solve for 
 . Noting that the metric is a function of
. Noting that the metric is a function of 
 are covariant to begin with).
are covariant to begin with). 

 with respect to a spatial component
with respect to a spatial component 
 can be simplified to involve only the
can be simplified to involve only the  -component of
-component of  (
(  ), as repetition of a form in a wedge product sets the entire expression to zero. We also have
), as repetition of a form in a wedge product sets the entire expression to zero. We also have  .
. 


 does not appear in the final volume form, so we are free to set
does not appear in the final volume form, so we are free to set  if we choose, as is the case with photons.
if we choose, as is the case with photons.  , containing
, containing  (~millions) points
(~millions) points  . Perhaps it’s the output of an
. Perhaps it’s the output of an  – for example
– for example  , the mass at each point.
, the mass at each point.  , and calculate some function at every point within it. For example, approximate the integral of the density by summing over the mass at each point:
, and calculate some function at every point within it. For example, approximate the integral of the density by summing over the mass at each point: 
 , where
, where  ,
,  contains only zeroes or ones, and
contains only zeroes or ones, and  contains
contains  iff
iff  ; also
; also  , but
, but  . Assume that this operation can be calculated efficiently (in parallel), as opposed to sequentially traversing the elements of an array, which is much slower (this is the case in the IDL programming language, for example).
. Assume that this operation can be calculated efficiently (in parallel), as opposed to sequentially traversing the elements of an array, which is much slower (this is the case in the IDL programming language, for example).  at each point – that is,
at each point – that is,  if
if  and
and  otherwise. Then the final calculation is
otherwise. Then the final calculation is 
 is itself a very large set, and that we have another, smaller region
is itself a very large set, and that we have another, smaller region  on which we would also like to perform calculations. Let
on which we would also like to perform calculations. Let  and
and  . Then we can compose our masks to find the
. Then we can compose our masks to find the  values that lie within
values that lie within  .
. 
![\displaystyle A = [0,1,2,\ldots,|S|] \\ B = (A \star S) \star S'](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle++A+%3D+%5B0%2C1%2C2%2C%5Cldots%2C%7CS%7C%5D+%5C%5C+B+%3D+%28A+%5Cstar+S%29+%5Cstar+S%27+&bg=ffffff&fg=333333&s=0&c=20201002)
 is written as
is written as 
 , i.e. a map that takes intervals to pitch ratios. We fix two intervals,
, i.e. a map that takes intervals to pitch ratios. We fix two intervals,  and
and  . Assuming it is not the case that
. Assuming it is not the case that  , these two intervals span
, these two intervals span  , so
, so  is now fixed for all
is now fixed for all  . This is because any
. This is because any  basis,
basis, 

 , otherwise octaves aren’t pure!
, otherwise octaves aren’t pure!  (e.g. P5) can be specified freely; then, perhaps
(e.g. P5) can be specified freely; then, perhaps  (e.g. P4) will come out correct too. After that you’re out of luck.
(e.g. P4) will come out correct too. After that you’re out of luck.  for the perfect fifth, and
for the perfect fifth, and  for the octave. As indicated above, this completely specifies the tuning. The procedure for general intervals is then as follows:
for the octave. As indicated above, this completely specifies the tuning. The procedure for general intervals is then as follows: 


 , i.e.
, i.e.  for some note
for some note  ; the common choice is
; the common choice is  , and
, and 


 :
: 




 .
.  , and note-mapping
, and note-mapping  .
.  ), assign the notes
), assign the notes  to their keys (with frequencies
to their keys (with frequencies  ), ending at
), ending at  (
( depending on whether
depending on whether  . This is called a wolf interval, and its existence limits the usefulness of syntonic tuning systems for keyboards.
. This is called a wolf interval, and its existence limits the usefulness of syntonic tuning systems for keyboards.  : under Pythagorean tuning, the A3 is about
: under Pythagorean tuning, the A3 is about  , to contrast with the pure P4 which is exactly
, to contrast with the pure P4 which is exactly  .
.  for some interval
for some interval  , and use
, and use  as our new basis, then because
as our new basis, then because  for some rational
for some rational  carefully so that all intervals can actually be represented by
carefully so that all intervals can actually be represented by  , then the tuning system is called
, then the tuning system is called 






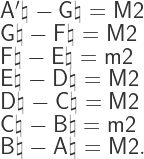
 and
and  . This means that
. This means that  , and
, and  . So A1 and m2 are identified, and are used as the generator
. So A1 and m2 are identified, and are used as the generator  , which is extremely close to the Pythagorean value!
, which is extremely close to the Pythagorean value!  , and five “black” notes
, and five “black” notes  . There are no more notes to account for, because the equivalency of A1 and m2 means that notes that differ by these intervals are identified, e.g.
. There are no more notes to account for, because the equivalency of A1 and m2 means that notes that differ by these intervals are identified, e.g.  and
and  .
.  .
. 
 be a curve on
be a curve on  in some coordinate system, and
in some coordinate system, and  in some other coordinate system. Then we can find a ‘velocity’ vector
in some other coordinate system. Then we can find a ‘velocity’ vector  , tangent to the curve, whose coordinates are
, tangent to the curve, whose coordinates are  . The coordinates of
. The coordinates of 
 with a basis by pairing up its components
with a basis by pairing up its components  with a basis
with a basis  , as well as the same in the primed coordinate system:
, as well as the same in the primed coordinate system: 
 for short – imagine a flat plane (
for short – imagine a flat plane (  ; in this case we can just say that it lives in
; in this case we can just say that it lives in  , and we have to be careful not to forget about its position-dependence even if we suppress it occasionally for notational convenience.
, and we have to be careful not to forget about its position-dependence even if we suppress it occasionally for notational convenience.  be a scalar field (just a real-valued function) on our manifold
be a scalar field (just a real-valued function) on our manifold 
 . The
. The 
 as components of a vector, we’ve found a one-to-one correspondence between vectors and first-order differential operators (strictly speaking it’s between vector components and operators, but all the transformation matrices between coordinate systems are one-to-one too so it doesn’t matter).
as components of a vector, we’ve found a one-to-one correspondence between vectors and first-order differential operators (strictly speaking it’s between vector components and operators, but all the transformation matrices between coordinate systems are one-to-one too so it doesn’t matter).  certainly transform in the correct way. We now make the formal identification
certainly transform in the correct way. We now make the formal identification 
 and
and  when talking about operators; and
when talking about operators; and  and
and  when talking about basis vectors.
when talking about basis vectors.  that satisfies linearity, i.e.
that satisfies linearity, i.e. 
 , rather than the
, rather than the 
 must be coordinate independent, as the left hand side makes no reference to any coordinate system; and we already know how to transform
must be coordinate independent, as the left hand side makes no reference to any coordinate system; and we already know how to transform  must use the opposite transformation,
must use the opposite transformation,  . So we have
. So we have 

 , much like how we earlier decided that
, much like how we earlier decided that  .
. 
 , which we have defined to be true.
, which we have defined to be true.  now comes in handy as a way to generate new covectors. In fact, covectors generated in this way have the following useful property:
now comes in handy as a way to generate new covectors. In fact, covectors generated in this way have the following useful property: 
 will not be the differential of any function at all.
will not be the differential of any function at all.


 . Unfortunately you also see people write the above as
. Unfortunately you also see people write the above as 
 ,
,  , where
, where 
 correspond to valid pitches. The set of pitches is actually extended upwards beyond that written above with super-prime symbols (
correspond to valid pitches. The set of pitches is actually extended upwards beyond that written above with super-prime symbols ( ), and downwards with sub-primes (
), and downwards with sub-primes ( ).
).  ,
,  , where
, where 
 is an octave, and
is an octave, and  a unison.
a unison.  are permitted; in particular, there are certain rules that allow one to construct valid intervals. Start with one of the eleven valid base intervals:
are permitted; in particular, there are certain rules that allow one to construct valid intervals. Start with one of the eleven valid base intervals: 
 , and in the positive
, and in the positive  ) is also in
) is also in 

 and
and  for convenience. I will use
for convenience. I will use  for interval vector addition and addition of intervals to pitches, and
for interval vector addition and addition of intervals to pitches, and  for interval vector subtraction and subtraction of pitches. I will use a dot
for interval vector subtraction and subtraction of pitches. I will use a dot  for scalar multiplication of interval vectors by integers.
for scalar multiplication of interval vectors by integers. 
 that actually exist in
that actually exist in 

 , for all
, for all  and
and  . Then,
. Then, 
 and
and  according to the following procedure: augment or diminish
according to the following procedure: augment or diminish  until you have a new interval
until you have a new interval  , along the way calculating an augmentation index
, along the way calculating an augmentation index  , where you increment
, where you increment  . Then perform the following interval addition, which is possible because addition is already defined on
. Then perform the following interval addition, which is possible because addition is already defined on 
 ) of augmentations on
) of augmentations on  , to give
, to give  :
: 
 .
.  of rank
of rank  , with
, with  , such that every element of
, such that every element of  .
. 



 to be the map that gives the decomposition into the (A1, d2) basis, then the above could be written as
to be the map that gives the decomposition into the (A1, d2) basis, then the above could be written as 


 into a vector space (Wikipedia suggests the name
into a vector space (Wikipedia suggests the name  with origin
with origin 

 .
.  be our interval in the (A1,d2) representation, and let
be our interval in the (A1,d2) representation, and let  and
and  be a different pair of linearly independent basis intervals. Then
be a different pair of linearly independent basis intervals. Then